









.
livello medio.
ARGOMENTO: MARINA MILITARE
PERIODO: XXI SECOLO
AREA: DIDATTICA
parole chiave: lotta anti sommergibili
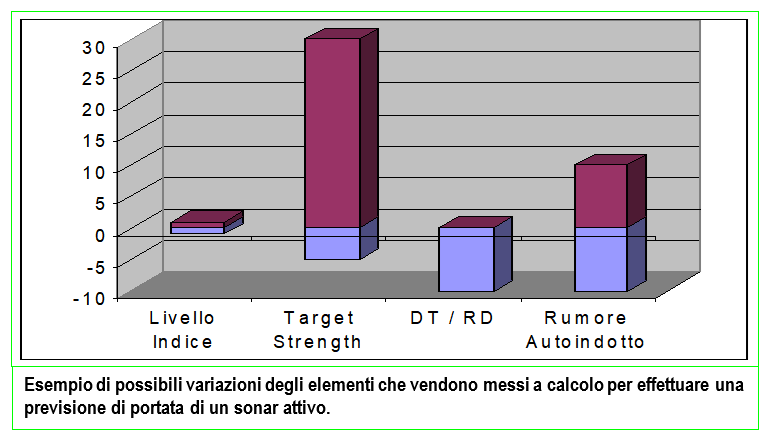
Esaminiamo ora più dettagliatamente i fattori che caratterizzano la portata sonar partendo dal Livello indice ovvero dalla potenza del sonar, probabilmente l’unico dato abbastanza certo. Essa viene fornita dal costruttore e viene periodicamente controllata dal personale tecnico. Ciò nonostante ci si può aspettare una tolleranza di un paio di dB rispetto ai dati di targa in quanto può essere, eventualmente, modificata (negativamente) da avarie o dalla cavitazione del trasduttore (quando, per effetto del mare mosso e in caso di forte beccheggio della nave, questo viene a trovarsi in acqua perturbata o meno densa nel momento in cui il sonar trasmette). Senza entrare in merito, per semplicità di trattazione, tralasciamo questi aspetti.
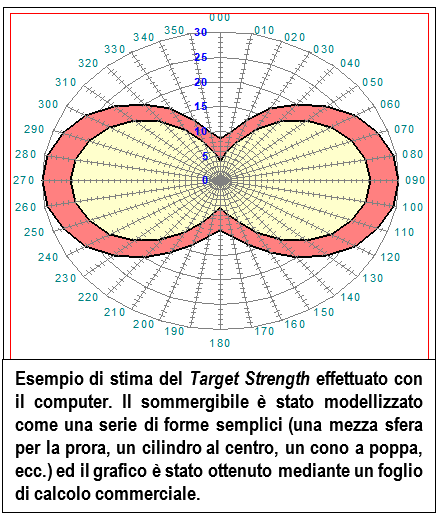
Il secondo punto da considerare è il Target Strength (il potere riflettente del bersaglio), un parametro che esprime le caratteristiche riflettenti del bersaglio subacqueo, ovvero nel nostro caso del sommergibile. Un valore che è già più difficile da stimare perché legato alle geometrie reciproche nave – bersaglio e dalle caratteristiche architetturali ed ingegneristiche dello stesso. In particolare, esistono dei metodi di calcolo teorici che, seppur complessi, potrebbero essere sfruttati da un qualsiasi Personal Computer, ma l’esperienza ha insegnato che la realtà è talvolta molto diversa dalla teoria in quanto lo scafo di un sommergibile è un insieme di forme complesse che interagiscono tra di loro. Inoltre, il sommergibile può essere o meno rivestito di materiale anecoico, cioè fono-assorbente, che riduce il suo potere riflettente e tale riduzione dipende dal materiale usato e dalla frequenza del sonar.
Gli errori associati a tale previsione possono essere dell’ordine di 5 dB. Inoltre può esserci una grande variabilità della energia riflessa dal sommergibile in relazione al suo aspect (o “Beta”, ovvero l’angolo rispetto alla sua prua verso il quale il sommergibile “vede” la nave): un sommergibile che presenta il traverso al sonar fornisce una riflessione maggiore di uno che presenta la prua o la poppa. In questo caso la differenza può essere dell’ordine dei 20-30 dB. Premesso quanto sopra, si arriva alla fase decisionale. Si parla di “rivelazione” quando il binomio “sonar – operatore” decide che c’è un contatto sonar valido: se il sonar “ritiene” che il segnale che ha ricevuto possa essere un sommergibile, lo rappresenta sullo schermo, e se l’operatore decide che il segnale rappresentato sullo schermo possa essere considerato valido comunica che è “in contatto sonar”. In questo processo, che viene fatto continuamente nel corso della ricerca, sono quindi coinvolti due “trattamenti del segnale” ricevuto: il sonar e l’operatore al sonar stesso.
Le capacità di “trattamento del segnale” del sonar sono note (fanno parte dei dati di targa), ed in tal caso si parla di “soglia di scoperta” (in inglese Detection Threshold – DT); va sottolineato che alcuni sonar hanno più di un ricevitore per cui effettivamente bisognerebbe parlare di un numero di soglie di scoperta a seconda ricevitore impiegato. Il campo di variazione delle prestazioni a seconda del ricevitore è di circa 4 – 5 dB, ma può anche salire notevolmente.
Ma non basta: nel “loop”, come abbiamo visto, entra anche “l’operatore al sonar” le cui prestazioni dipendono dal livello di addestramento ma anche delel condizioni in cui opera. In difficili condizioni acustiche (bassi fondali, navi, scie, emissioni di altri sonar simili nelle vicinanze) può avere bisogno di 3 – 6 dB in più di un operatore addestrato che opera in un ambiente tranquillo per scoprire un bersaglio. Questo segnale “in più” viene chiamato “Differenziale di Riconoscimento” (in inglese Recognition Differential – RD).
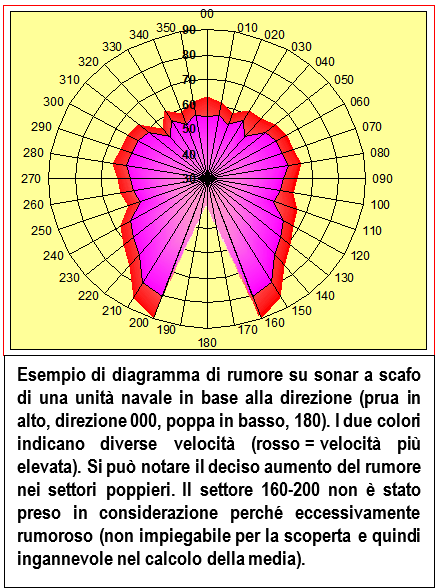
Non ultimo abbiamo il rumore “autoindotto”, principalmente costituito da quella parte del rumore della nave che “entra” nel ricevitore del sonar influendo (negativamente) sulla portata sonar, in pratica “rosicchiando” segnale utile. Essendo prodotto principalmente dalla propulsione e dagli apparati ausiliari (macchinari e impianti) della nave stessa, nonché dal flusso dell’acqua sulla cuffia del sonar (che si aggiunge a quello “elettronico” insito di ogni apparecchiatura), tale rumore non solo varia con la velocità della nave, ma è anche distribuito in maniera non uniforme, in quanto dipende dalla posizione del trasduttore del sonar rispetto alle varie apparecchiature rumorose di bordo. Tipicamente, per un sonar a scafo, questo rumore è maggiore nei settori poppieri rispetto a quelli prodieri a causa del rumore prodotto dalle eliche. In caso di sonar rimorchiato, invece, accade ovviamente l’opposto, trovandosi la nave a proravia del sonar stesso). Ma non è tutto qui: infatti si possono avere variazioni sostanziali del rumore (dei “picchi” o dei “cavi”), anche a distanza di pochi gradi, a causa di apparecchiature ausiliarie installate nelle vicinanze del trasduttore del sonar. Queste variazioni possono essere dell’ordine di idee di 10 dB e variare nel tempo, in corrispondenza della accensione o spegnimento di apparati (ad esempio pompe, compressori, condizionatori, ecc.). Inoltre, il sonar viene disturbato anche dal rumore ambientale circostante, prodotto dal mare più o meno agitato, da eventuali piovaschi, da attività umane nelle acque litoranee, dal traffico navale in zona e dalla presenza in acqua di organismi viventi (tutt’altro che silenziosi).
Arriviamo ora al calcolo della portata, o meglio alla sua previsione: un dato per lo più unico/semplice in quanto facilmente fruibile a livello operativo che si ricava dal calcolo dei seguenti elementi:
-
l’ultima “potenza del sonar” misurata (un dato che non sempre è aggiornato);
-
il “minimo potere riflettente” stimato (legato alla posizione del sommergibile che potrebbe mostrare la prora o il suo mascone);
-
il “miglior trattamento del segnale”;
-
il livello di addestramento del personale;
-
il “rumore autoindotto medio” misurato ad una data velocità della nave;
-
lo stato del mare rilevato in quel momento;
-
la “quota del sommergibile sfavorevole alla scoperta” (da parte della nave).
A prescindere dalla potenza effettiva del sonar e del ricevitore impiegato (che sono gli elementi più “stabili”), difficilmente accade che, quando l’unità prende contatto sonar con il sommergibile, questo si presenti contemporaneamente: alla quota stimata mostrando la prora, e si trovi nella direzione dove c’è un rumore corrispondente a quello medio. Inoltre è improbabile che, in quel momento, la nave stia navigando alla velocità per la quale è stata prevista la portata e l’operatore non sia distratto da falsi allarmi.
La presenza non rara di condizioni marine avverse, mare grosso o comunque ben formato, provoca prestazioni differenti a seconda del fatto che la nave proceda con il mare in poppa o in prora e che la direzione di ricerca del sonar sia contro la direzione di provenienza o meno del mare. Per quanto sopra, solamente prendendo in considerazione i parametri non esattamente noti (e non eventuali errori di valutazione) si evince che attorno al calcolo di previsione di portata esisterà quindi un campo di variazione di circa 40-50 dB. E 40-50 dB sono veramente tanti!
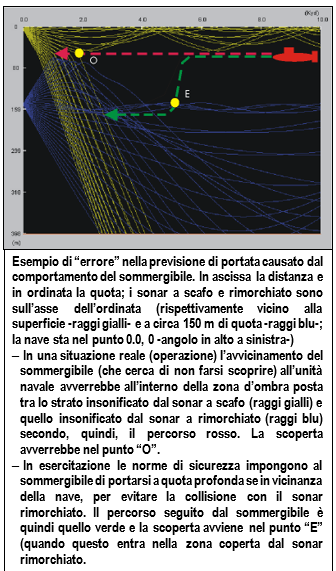
E non è tutto. Il suono in acqua, nel Mar Mediterraneo, viaggia quasi rettilineo solo per un limitato periodo dell’anno (in inverno), mentre nel resto dell’anno (come negli oceani) si vengono a creare “zone d’ombra” o “focalizzazioni” più o meno sfruttabili. In questo caso anche la quota del sommergibile diviene importante, profondità sotto le quali il battello può nascondersi. Non ultimo, vanno considerati eventuali rimbalzi sul fondo, che può essere più o meno sono-assorbente, con caratteristiche di riflessione variabili anche su distanze relativamente brevi.
In caso di esercitazione, si applicano delle regole di sicurezza che generano comportamenti “anomali” sia da parte delle navi che del mezzo subacqueo. Ad esempio un battello può sfruttare una zona d’ombra superficiale, tipica di un sonar rimorchiato, per avvicinarsi alla nave senza essere scoperto, ma quando si trova molto vicino, intervengono le regole di sicurezza che gli impongono di immergersi ad una quota più profonda, entrando così nella zona in cui il sonar rimorchiato può scoprirlo. L’efficienza del sonar è invece limitatamente influenzata dalla potenza emessa dal trasduttore che, anche se si riducesse alla metà, causerebbe una perdita di “soli” 3 dB.
In conclusione, sperando di aver descritto chiaramente anche ai non addetti ali lavori il significato della “portata sonar prevista”, essa deve essere sempre intesa come una “distanza media di scoperta”. Nel mondo reale non si possono quindi escludere errori ampi anche del 100%. Tempo fa una “regola non scritta” della US Navy diceva che “Data una previsione di portata sonar, il sommergibile verrà tipicamente scoperto ad una distanza compresa tra la metà ed il doppio di tale portata”.

Si ringrazia per la consulenza operativa di superficie l’ammiraglio Marco Bandioli e per quella tecnica l’ammiraglio AN ris. John Crastolla
.
.
PAGINA PRINCIPALE - HOME PAGE.
.
Alcune delle foto presenti in questo blog possono essere state prese dal web, citandone ove possibile gli autori e/o le fonti. Se qualcuno desiderasse specificarne l’autore o rimuoverle, può scrivere a infoocean4future@gmail.com e provvederemo immediatamente alla correzione dell’articolo
.
.

- autore
- ultimi articoli

Contrammiraglio in congedo della Marina Militare italiana (riserva) con grande esperienza operativa a bordo di fregate e cacciatorpediniere. Durante la sua lunga carriera ha prestato servizio in Comandi nazionali e NATO contribuendo alla stesura di pubblicazioni nel campo delle operazioni marittime. Ha redatto diverse pubblicazioni di dottrina nazionale, tra cui le linee guida per la riduzione dell’impatto ambientale dei sonar attivi sui mammiferi marini. E’ attualmente consulente indipendente per FINCANTIERI






































Lascia un commento
Devi essere connesso per inviare un commento.