












livello elementare
.
ARGOMENTO: ARCHEOLOGIA
PERIODO: XX-XXI SECOLO
AREA: SVILUPPI DELLA SCIENZA
parole chiave: robot
In origine, OceanOne non era nato per lavorare come robot archeologico ma idealizzato dagli scienziati del King Abdullah University of Science and Technology (KAUST) dell’Arabia Saudita come sistema per monitorare le barriere coralline di profondità del Mar Rosso al fine di identificare possibili rimedi al drammatico imbiancamento dei coralli.
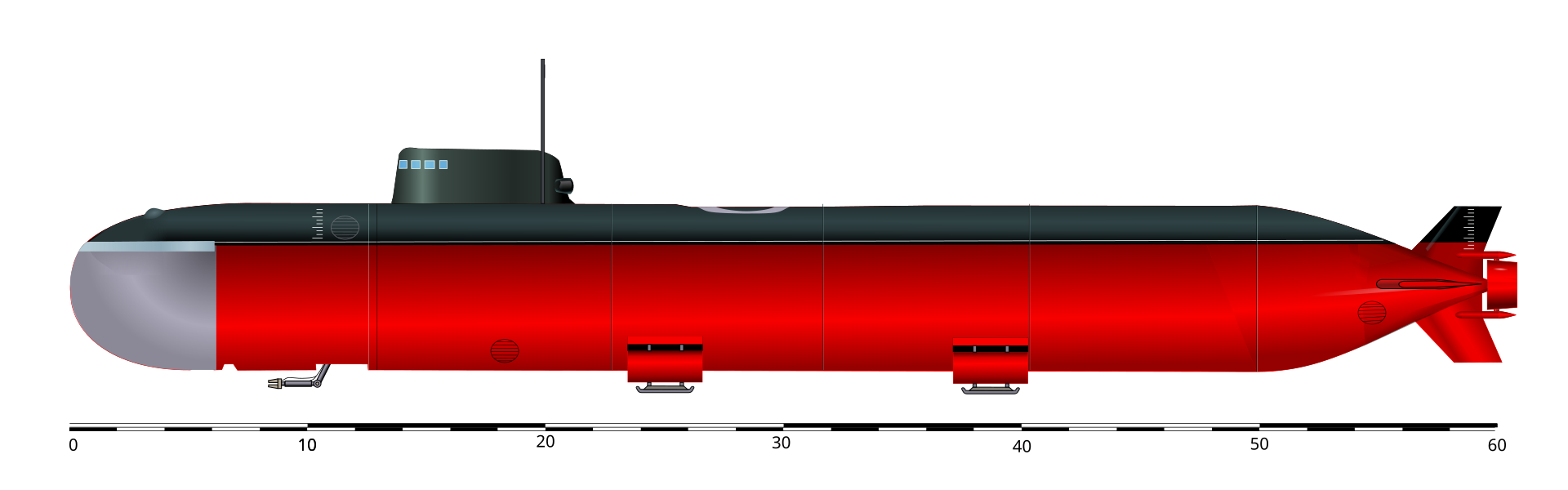
Oggigiorno gli scienziati utilizzano ROV (Remote Operated Vehicle) per esaminare le delicate colonie di corallo ma il loro operato è considerato invasivo, sicuramente non il massimo per la loro fragile struttura. Il team del KAUST ha quindi proposto all’Università di Stanford di studiare un mezzo alternativo e il passo verso un robot subacqueo è stato breve. OceanOne, cosi è stato chiamato, è più piccolo di un subacqueo (circa 5 piedi di lunghezza). La sua circuiteria elettronica non è stata impermeabilizzata ma i circuiti sono immersi in olio che, a differenza dell’aria, non si comprime, consentendo così di operare ad una profondità massima di 2000 metri.
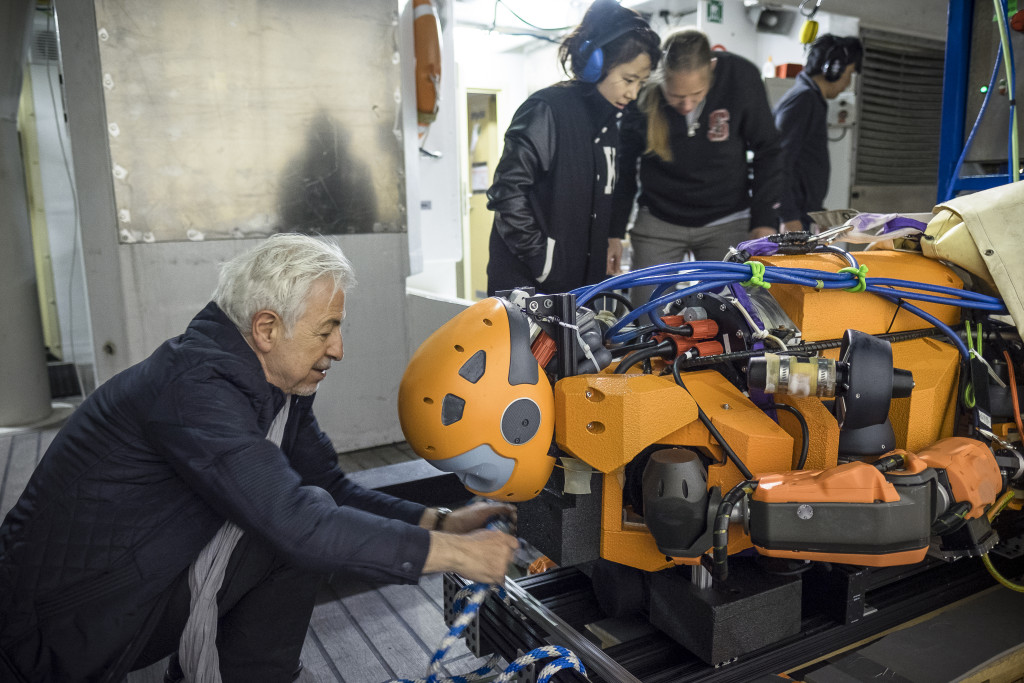
Tra gli esperti internazionali Oussama Khatib della Stanford University ha guidato il design di Ocean One, un robot in grado di esplorare le profondità degli oceani. Expertos mundiales en robótica mostraron sus más recientes avances | Ingeniería UC
OceanOne è stato progettato dalla prestigiosa università statunitense per manovrare con precisione in spazi ristretti utilizzando otto propulsori per mantenersi stabile anche in forti correnti. Ma la sua caratteristica forse più innovativa è la coppia di bracci meccanici intelligenti che rappresentano l’ultimo progetto della Meka Robotics. I “polsi” sono dotati di sensori di forza per una valutazione remota degli sforzi e, in futuro, si pensa di coprire ogni dito con dei sensori tattili. Con le braccia, le mani e una testa corredata di sensori, OceanOne si avvicina molto ad un essere umano rendendolo quindi più adatto di altri ROV ad ispezioni biologiche in ambienti delicati o, come vedremo, per la ricerca di artefatti su siti archeologici subacquei.

OceanOne – https://www.nauticalnewstoday.com/oceanone-robot-buceador-humanoide/
La sua capacità di operare con una maggiore delicatezza dei normali manipolatori è dovuta ad un sistema di controllo a feedback che permette un’attenta manipolazione di oggetti fragili. Il mezzo si basa sulla telepresenza (controllo attivo a distanza) che utilizza il feedback tattile dei bracci del robot che consente di prelevare oggetti con una delicatezza mai raggiunta senza schiacciarli ma anche di afferrarli con fermezza.
La prima spedizione di OceanOne è stata svolta sotto l’egida del dipartimento di ricerche archeologiche subacquee e sottomarine dell’università di Marsiglia che ha già individuato altri 300 relitti che potrebbero essere raggiunti dal robot. La missione è avvenuta sul relitto della La Lune, la nave reale di Luigi XIV che affondò a 20 miglia al largo della costa meridionale della Francia in circa 100 metri di profondità. il relitto fu affondato a 32 km (20 miglia) al largo della città francese di Tolone, nel novembre 1664, portando con sé un migliaio di marinaio. Un centinaio di metri di profondità possono non sembrare molto ma chi pratica la subacquea sa che l’operare a quella quota implica forti limiti di impiego per gli operatori a causa dei notevoli rischi in gioco.
.
Con la guida del team di esperti archeologi, che avevano precedentemente studiato il sito, il dottor Khatib dell’Università di Stanford ha guidato il robot sul relitto, individuando fra le varie reliquie un vasetto di medie dimensioni. Khatib, stando seduto comodamente sulla barca appoggio, utilizzando una serie di joystick per controllare l’OceanOne, ha sfruttato la capacità di visione umana, il feedback tattile e il cervello artificiale del robot per manovrare questo “subacqueo virtuale”. L’umanoide color arancio e nero ha completato con successo il suo viaggio inaugurale dimostrando come i “polsi” di OceanOne, dotati di sensori di forza, siano in grado di trasmettere un feedback tattile ai controlli remoti del pilota, consentendo di sentire le caratteristiche dell’oggetto ovvero di valutarne il suo peso. In futuro, i progettisti di Stanford vorrebbero aggiungere sensori tattili alle sue dita per incrementare la capacità discriminatoria verso oggetti di piccole dimensioni. Mentre il robot operava librandosi al di sopra del vasetto, Khatib allungò la mano, sentendo come per far magia i contorni ed il peso dell’oggetto. Afferratolo con le mani meccaniche, si spostò per depositarlo verso il cestello di recupero. Un successo strabiliante.
Colleghiamo l’umano al robot in modo molto intuitivo e significativo” … in pratica viene riunito sinergicamente l’essere umano in grado di fornire l’intuizione, esperienza alle capacità cognitive e di manovra del nuovo robot.
OceanOne è ancora un prototipo, e il dottor Voolstra del KAUST ha spiegato che “i nostri piani sono di condurre una serie di esperimenti che mettano in risalto, in particolare, la destrezza bimanuale e la sensibilità del robot, e la sua capacità di condurre una ricerca“. Voolstra spera quindi di usarlo per studiare le barriere coralline mesofotiche, che vivono ad una quota troppo profonda per gli esseri umani. Si tratterebbe di studiare queste barriere coralline che non sono affette dal fenomeno di sbiancamento che ha assunto proporzioni record anche sulla Grande barriera australiana.
Secondo un rapporto dell’Organizzazione delle Nazioni Unite, diffuso nel corso dell’Assemblea per l’Ambiente tenutasi a Nairobi, Kenya, sembrerebbe che parti dell’ecosistema corallino possano sopravvivere nei sistemi “mesofotici” che si trovano a profondità maggiori rispetto alle tradizionali barriere ovvero tra i 40 e i 150 metri al di sotto della superficie marina. Lo studio dell’Università di Sydney ha coinvolto anche altri enti di ricerca ed esamina il ruolo che questi ecosistemi potrebbero avere ai fini della conservazione delle barriere coralline più superficiali, fornendo una sorta di ‘rifugio’ per le specie minacciate e una possibile fonte di ‘ripopolamento’ per i coralli in declino. I risultati finora disponibili indicano che alcuni sistemi “mesofotici” sono meno vulnerabili al riscaldamento degli oceani, mente altri sono esposti tanto quanto le barriere coralline meno profonde. Uno spiraglio di speranza c’è ed è per questo che le Nazioni Unite incoraggiano ad approfondire le ricerche in questa direzione per preservare le barriere dai rischi legati ai cambiamenti climatici. Il programma è di effettuare in situ degli studi fisiologici sulle barriere coralline in profondità come la misurazione fluorimetrica di diverse specie di coralli profondi e sul loro adattamento a condizioni di scarsa illuminazione adattamento.
OceanOne e i suoi “fratelli” potrebbero darci un aiuto sostanziale. Come sempre … il futuro è dietro l’angolo che … abbiamo già girato.
.

- autore
- ultimi articoli
è composta da oltre 60 collaboratori che lavorano in smart working, selezionati tra esperti di settore di diverse discipline. Hanno il compito di selezionare argomenti di particolare interesse, redigendo articoli basati su studi recenti. I contenuti degli stessi restano di responsabilità degli autori che sono ovviamente sempre citati. Eventuali quesiti possono essere inviati alla Redazione (infoocean4future@gmail.com) che, quando possibile, provvederà ad inoltrarli agli Autori.















")






















Lascia un commento
Devi essere connesso per inviare un commento.