











.
livello elementare
.
ARGOMENTO: ARCHITETTURA NAVALE
PERIODO: XXI SECOLO
AREA: DIDATTICA
parole chiave: Catamarani, AUV
.
Un recente articolo pubblicato su Academia, Progettazione di un ASV non convenzionale per il recupero di veicoli subacquei: simulazione dei movimenti per operazioni in mare mosso di Francesco Brizzolara e Chryssostomos Chryssostomidis, fornisce le principali caratteristiche e dettagli di un progetto innovativo per un drone di superficie per il rilascio e recupero autonomo di AUV (veicoli subacquei autonomi) in mare aperto anche in condizioni di mare mosso. L’USV proposto è un catamarano, con un’interessante forma di scafo (tipo SWATH non convenzionale) con un hangar dedicato al centro nave in grado di ospitare un AUV di medie dimensioni. Nello studio gli autori si concentrano sulla previsione delle caratteristiche idrodinamiche stazionarie e instabili in termini di resistenza dello scafo e movimento delle onde. In estrema sintesi, dai test effettuati, sembrerebbe che la risposta al beccheggio e al sollevamento dell’USV-SWATH con onde regolari relativamente alte confrontata con quella di un’imbarcazione a catamarano equivalente restituisca una drastica riduzione dei movimenti verticali e delle accelerazioni.
Concetto di impiego
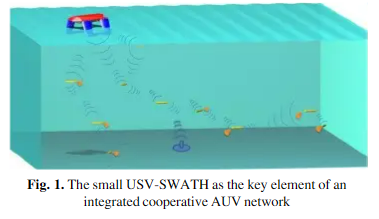
Il monitoraggio persistente di grandi tratti marini, che coinvolgerà in futuro reti cooperative di veicoli subacquei autonomi (AUV), è uno dei settori di maggiore interesse nel campo della robotica subacquea per applicazioni scientifiche/civili (qualità dell’acqua, oceanografia) così come per altri scopi militari, come ad esempio in compiti di sicurezza/sorveglianza di aree sensibili. In questi ultimi anni si sono ottenuti interessanti progressi tecnologici sia nella progettazione di veicoli subacquei ottenendo maggiori capacità d maggiori autonomie, sia nell’intelligenza di questi mezzi autonomi. Su quest’ultimo argomento vale la pena citare il lavoro di Bahr et al. (2009) sui sistemi di navigazione acustica distribuita, con pianificazione adattiva del percorso per ottenere un posizionamento cooperativo per missioni di lunga durata su vaste aree. Nell’articolo vengono anche citati gli studi di Huntsberger & Woodward (2011) che hanno trasferito l’esperienza acquisita dal JPL della NASA sui veicoli spaziali autonomi allo sviluppo di nuovi veicoli sottomarini, sostenendo l’idea di una rete cooperativa di veicoli di superficie e sottomarini (vedi Fig. 1) per fornire delle capacità di missione adattative. Secondo gli autori gli studi citati rappresentano delle tecnologie necessarie ma non ancora sufficienti per realizzare efficacemente una rete di AUV. La sua realizzazione pratica è limitata, infatti, dalla durata relativamente esigua degli interventi di manutenzione periodica agli AUV e dalla necessaria ricarica delle batterie.
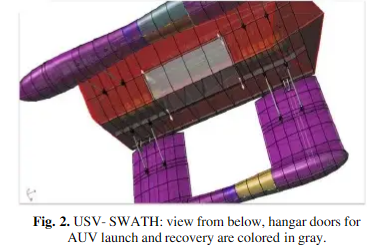
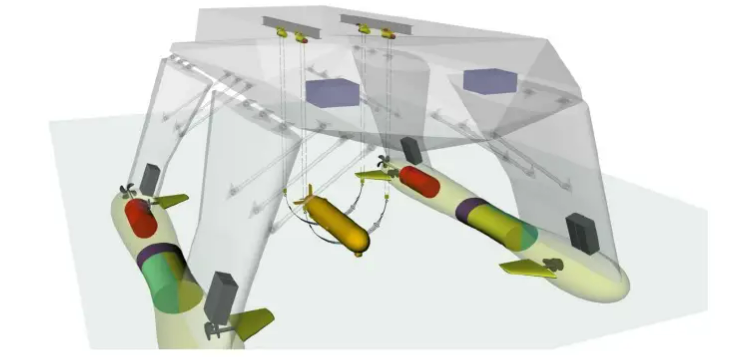
Le attuali unità appoggio sono dotate di apposite gru per il lancio e il recupero degli AUV, gestite dall’equipaggio, che solitamente si occupano anche di trasportare i veicoli nello specifico teatro operativo. Arrivando al soggetto dell’articolo pubblicato, è facile dedurre che un Unmanned Surface Vessel (USV), specificatamente dedicato a supportare Autonomous Surface Vehicle (ASV) ed in grado di lanciarli, recuperarli e ricaricarli sul posto, è la vera sfida da superare per realizzare un sistema idoneo alla realizzazione di reti autonome di monitoraggio tramite mezzi AUV di ampie aree marine. Sotto input del Centro di ricerca sottomarina della NATO di La Spezia, Italia, è stata avviata la progettazione e lo sviluppo di un ASV innovativo basato su una forma di scafo SWATH non convenzionale il cui layout di base è mostrato in Fig.2 e Fig.3. Secondo gli autori, il progetto si basa su una forma dello scafo a catamarano ottimizzata per ridurre al minimo il fabbisogno di potenza e i movimenti in condizioni di mare avverso. Il mezzo autonomo di superficie avrebbe principalmente un profilo di missione mirato al trasporto di droni subacquei di medie dimensioni ma manterrebbe la possibilità di effettuare autonomamente campagne di misura tramite un set di sensori propri.
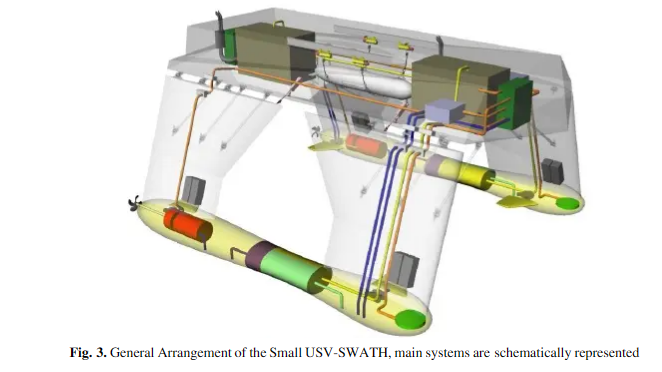
La Fig. 3 mostra una vista 3D della disposizione generale del USV-SWATH. Gli scafi subacquei sono lunghi 6 metri e il dislocamento a pieno carico della nave è di circa 4,2 t con una velocità di progetto di 12 nodi. Il sistema di propulsione è diesel-elettrico assicurato da due gruppi elettrogeni da 25 kWe nel corpo principale (evidenziati con dei riquadri marroni in Fig.3), due motori elettrici DC brushless da circa 20 kW nella parte inferiore dello scafo collegati tramite ingranaggi epicicloidali (cilindri rossi) alle eliche a passo fisso. Nella parte inferiore dei montanti (scatole grigie) sono alloggiati quattro pacchi batteria. I serbatoi del carburante e della zavorra di compensazione sono montati nella parte centrale degli scafi inferiori (porzioni colorate in rosso e giallo) e dimensionati per garantire una riserva di energia sufficiente a coprire un’autonomia di circa 120 miglia (a 12 nodi) e ricaricare gli AUV in un’unica sortita. La struttura superiore (corpo principale) è suddivisa in tre sezioni da due paratie stagne: la sezione centrale ospita il sistema di launch and recovery e di ricarica per gli AUV (nell’esempio mostrato nella Fig. 3 vediamo un veicolo lungo 2 metri all’interno della sezione di attracco, nella sua posizione di riposo). Su ogni scafo subacqueo sono montate due paia di pinne stabilizzatrici attivate da un sistema di controllo della corsa integrato sia per correggere l’assetto dinamico e di profondità dello SWATH ad alte velocità sia per smorzare i movimenti di rollio, beccheggio e imbardata causati dalle onde. La forma dello scafo SWATH è stata ottimizzata per ottenere la resistenza aerodinamica più bassa ad una velocità di crociera di 12 nodi.
Nello studio viene proposto un sistema di salita e discesa dell’AUV dall’hangar posto al centro nave simile a quelli implementati nei “Travel Lift”, comunemente utilizzati in molti cantieri navali di tutto il mondo per sollevare imbarcazioni e yacht di piccole/medie dimensioni (fino a 500 tonnellate). Una volta in acqua l’AUV è guidato tra i due scafi inferiori dello SWATH dal fascio acustico di un sonar posizionato all’interno dei due scafi; quando il drone è in posizione e correttamente allineato, il sistema di controllo dà il segnale di conferma per iniziare la manovra di recupero. Una volta sollevato, l’AUV viene poi assicurato mediante un tensionamento calibrato dei paranchi.
In sintesi, le caratteristiche di resistenza e tenuta al mare e le principali caratteristiche progettuali di questo nuovo tipo di USV a scafo SWATH, che permette di diminuire la resistenza totale di oltre il 25% alle alte velocità rispetto ad un progetto convenzionale, lo rendono un interessante candidato per eseguire il lancio e recupero autonomo di AUV in mare aperto. Come sottolineato dagli autori, dovranno però essere ulteriormente valutati in mare i moti relativi dell’USV e dell’AUV, l’efficacia dello smorzamento degli effetti del mare ottenibili tramite gli stabilizzatori attivi (pinne o dispositivi giroscopici, e l’efficacia di un innovativo sistema di ricarica subacquea wireless dagli USV agli AUV.
.
PAGINA PRINCIPALE - HOME PAGE
.
Alcune delle foto presenti in questo blog possono essere state prese dal web, citandone ove possibile gli autori e/o le fonti. Se qualcuno desiderasse specificarne l’autore o rimuoverle, può scrivere a infoocean4future@gmail.com e provvederemo immediatamente alla correzione dell’articolo
.
.

- autore
- ultimi articoli
è composta da oltre 60 collaboratori che lavorano in smart working, selezionati tra esperti di settore di diverse discipline. Hanno il compito di selezionare argomenti di particolare interesse, redigendo articoli basati su studi recenti. I contenuti degli stessi restano di responsabilità degli autori che sono ovviamente sempre citati. Eventuali quesiti possono essere inviati alla Redazione (infoocean4future@gmail.com) che, quando possibile, provvederà ad inoltrarli agli Autori.





























Lascia un commento
Devi essere connesso per inviare un commento.