












.
livello medio
.
ARGOMENTO: ARCHEOLOGIA
PERIODO: XXI SECOLO
AREA: TECNOLOGIA
parole chiave: robot, archeo
.
I progressi della tecnologia oceanografica offrono sempre più strumenti per ottimizzare le ricerche subacquee anche in campi specialistici. Il progetto ArcheoROV è stato sviluppato e costruito nel Roverto WitLab, che si trova nel Green Manufacturing Project incubator di Trentino Development. Un progetto quindi tutto italiano costruito per la Arc-Team, una società che fornisce molteplici servizi nel campo del patrimonio culturale, tra cui il supporto all’archeologia subacquea, riprese aeree da droni volanti, ricerche archivistiche, studi storici e scavi archeologici.

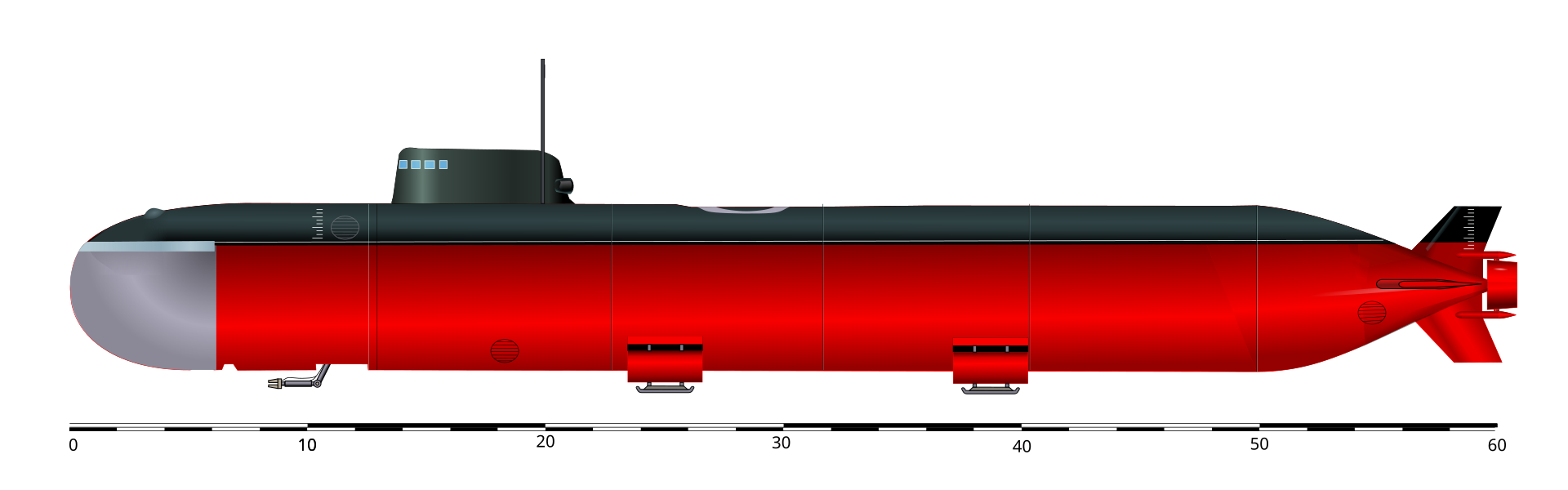
Archeo-ROV, drone subacqueo di Arc-Team Fonte Mostra “Val di Non. Sguardi sulla Grande Guerra”. Sede di Livo (Archeologia della Grande Guerra) – autore foto Niccolò Caranti Archeo-ROV 01.jpg – Wikipedia
Lo scopo della ricerca è lo sviluppo di un ROV (Remotely Operated Underwater Vehicle) Open Hardware, specificatamente disegnato per scopi di archeologia subacquea. Il progetto si inserisce nella linea di ricerca della Arc-Team che, dal 2006, si occupa di studiare e sviluppare progetti di robotica ed elettronica applicata all’archeologia, conseguendo importanti risultati come lo sviluppo di droni Open Hardware per l’esplorazione aerea e piccoli dispositivi di analisi archeologiche, sempre basati su elettronica Open Hardware ovvero disponibile a tutti per applicazioni personalizzate.
ArcheoRov è un dispositivo pensato per poter supportare missioni archeologiche allo scopo di ottimizzare il lavoro dei subacquei, consentendo di risparmiare tempo ed energie e delegando alla macchina i compiti più dispersivi, come le missioni esplorative. Questa strategia permette agli operatori umani di concentrarsi su immersioni finalizzate allo studio di evidenze già individuate. Oltre a ciò, ArcheoROV è in grado di eseguire quelle operazioni che un subacqueo non potrebbe effettuare in completa sicurezza, come la documentazione 3D SfM di manufatti o ecofatti sviluppati in altezza (qualora vi sia un cambio barimetrico/batometrico importante), per la quale sarebbe necessario un continuo movimento ascensionale e discensionale che potrebbe portare problemi decompressivi. Inoltre, il ROV è in grado di operare senza problemi a profondità notevoli (fino a 100 m) ed in condizioni termiche difficili (4-5 gradi), che comporterebbero voci economiche importanti se affidate ad archeologi subacquei. Un tale approccio permette di espandere il campo dell’esplorazione dei fondali sommersi anche ad aree non ancora ben indagate. Da un punto di vista tecnico ArcheoROV è stato sviluppato sin dall’inizio per essere un veicolo subacqueo teleguidato tramite il sistema Open Source ROS (Robot Operating System), montato sulla scheda aperta BeagleBone Black.
Questa implementazione è stata considerata sin dall’inizio per poter gestire algoritmi di localizzazione e mappatura di tipo SLAM (Simultanous Localization and Mapping), basati inizialmente su tecniche odometriche via camere USB e aperti a future integrazioni via sonar. Inoltre il sistema ROS permetterà in futuro di gestire tutta l’eventuale sensoristica con cui potrebbe essere necessario equipaggiare ArcheROV, tramite moduli aggiuntivi esterni. L’hardware ArcheoRov è stato progettato utilizzando SOLIDWORKS con software scritto in Python. Il primo modello, con una fotocamera per la navigazione e uno per le riprese 3D, è già disponibile, ma WitLab è già tornato al tavolo da disegno, sviluppando una versione dotata di sonar con un termometro e un braccio meccanico.
immagine in anteprima: credit @ andrea mucedola
PAGINA PRINCIPALE - HOME PAGE

- autore
- ultimi articoli
è composta da oltre 60 collaboratori che lavorano in smart working, selezionati tra esperti di settore di diverse discipline. Hanno il compito di selezionare argomenti di particolare interesse, redigendo articoli basati su studi recenti. I contenuti degli stessi restano di responsabilità degli autori che sono ovviamente sempre citati. Eventuali quesiti possono essere inviati alla Redazione (infoocean4future@gmail.com) che, quando possibile, provvederà ad inoltrarli agli Autori.















")






















{kind=link}
Lascia un commento
Devi essere connesso per inviare un commento.